








Système de mouvement de simulateur de vente chaude 6 DOF
Notre plate-forme de mouvement 6DOF peut simuler une variété de poses de mouvement spatial et peut être largement appliquée à divers simulateurs de formation tels que simulateur de vol, simulateur de navire naval, plate-forme de simulation de décollage et d'atterrissage d'hélicoptère naval, simulateur de réservoir, simulateur de conduite automobile et conduite de train. simulateur et film dynamique, équipement de divertissement et ainsi de suite.

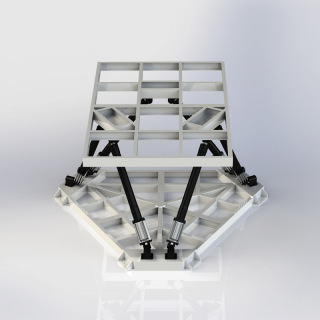
Caractéristiques de la plate-forme de mouvement 6 DOF :
1. Fabriqué en acier qui a une belle apparence, une structure compacte, un faible bruit de fonctionnement et est facile à entretenir.
2. Le système d'asservissement avec contrôle numérique complet est utilisé pour un contrôle précis, le mouvement de la plate-forme est fluide et continu, également avec une réponse rapide à grande vitesse et un fonctionnement stable à basse vitesse.
3. Adoptant notre propre rotule dédiée de robot parallèle, la course maximale de celui-ci peut atteindre 35° avec une grande précision.
4. Le cylindre électrique adopte une nouvelle structure à connexion directe avec un moteur intégré à l'intérieur, ce qui peut le rendre suffisamment compact. Pendant ce temps, la vis de précision ultra-silencieuse est également appliquée dans le cylindre avec un très faible bruit.
5. Tous les blocs inclinés sont complétés dans le centre d'usinage qui peut assurer la précision de positionnement de chaque côté.
6. À l'aide d'une carte de contrôle auto-développée, il intègre une variété de modèles de données et d'algorithmes de plate-forme 6 DOF, il peut effectuer des opérations mathématiques correspondantes en recevant la date de pose de l'ordinateur supérieur, puis calculer la course de six cylindres. Il peut également ajuster la douceur et la vitesse de fonctionnement de la plate-forme.
Spécification principale :
La performance du système
Posture Unité Amplitude Rapidité Houle millimètre ±500 200 mm/s Monter millimètre ±400 200mm/s Se balancer millimètre ±400 200mm/s Terrain ° ±30 10°/s Rouleau ° ±30 10°/s Embardée ° ±30 10°/s
Spécification de la charge utile
| Poids du produit | 5021 kilogrammes |
| Charge utile | 4000 kilogrammes |
Dimensions du produit
| Longueur | 5000 millimètres |
| Largeur | 3000 millimètres |
| Hauteur min. | 2670 millimètres |
Exigences d'alimentation
| Source de courant | 380V triphasé |
| Connexion | Ethernet |
Système de contrôle (armoire électrique)

Système de contrôle: le logiciel de contrôle intégré s'exécute sur le contrôleur principal, et le contrôleur de mouvement utilise le contrôleur de mouvement de bus haute performance Gugao, et utilise l'algorithme de cinématique avant et inverse développé indépendamment par notre société pour réaliser le contrôle de mouvement du six degrés plate-forme de mouvement en toute liberté.
Le logiciel de contrôle comprend, mais sans s'y limiter, les modules fonctionnels suivants : module de fonction d'auto-inspection du système, module de fonction de connexion réseau, module de fonction de configuration des paramètres, module de fonction de machine d'état, module de fonction de prétraitement des données, module de fonction de planification de trajectoire, module de fonction de calcul de la cinématique , module de fonction de communication de bus, module de fonction d'E/S numériques, module de fonction de retour d'état, module de fonction d'alarme de défaut et module de fonction de sécurité.
Le logiciel de contrôle fournit l'interface de développement secondaire et ouvre l'interface et le protocole de communication à la partie A. La plate-forme à six degrés de liberté fonctionne de manière fluide, fluide et sans trébuchement. Les algorithmes de cinématique directe et inverse remontent en temps réel l'attitude de la plate-forme ou les données de position du vérin électrique. L'algorithme a la fonction de protection de sécurité interne pour la plate-forme, qui n'endommagera pas la plate-forme si l'utilisateur saisit les données par erreur !




