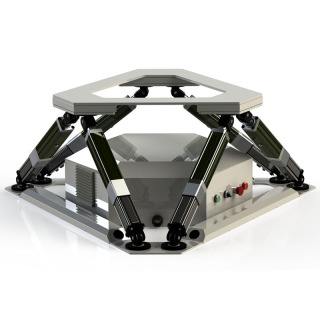
Automobile driving simulator motion base
Motion bases are widely used in various training simulators, such as flight simulators, ship simulators, naval helicopter take-off and landing simulation platforms, tank simulators, car driving simulators, train driving simulators, earthquake simulators, dynamic movies, entertainment equipment and other fields, and even in the docking of space spacecraft and refueling docking of air tankers; Cultural entertainment equipment, new interactive entertainment experience equipment, engineering simulation, design evaluation, testing, experiment, task training, training evaluation, environmental simulation, event recurrence, etc.
Spécification principale :
La performance du système
Posture Unité Amplitude Rapidité Houle millimètre ±160 375 mm/s Monter millimètre ±160 375 mm/s Se balancer millimètre ±160 375 mm/s Terrain ° ±16 15°/s Rouleau ° ±16 15°/s Embardée ° ±16 15°/s
Spécification de la charge utile
| Poids du produit | 349 kilogrammes |
| Charge utile | 1000 kilogrammes |
Dimensions du produit
| Longueur | 2000 millimètres |
| Largeur | 1515 millimètres |
| Hauteur min. | 780 millimètres |
Exigences d'alimentation
| Source de courant | 380V triphasé |
| Connexion | Ethernet |
Système de contrôle (armoire électrique)

Système de contrôle: le logiciel de contrôle intégré s'exécute sur le contrôleur principal, et le contrôleur de mouvement utilise le contrôleur de mouvement de bus haute performance Gugao, et utilise l'algorithme de cinématique avant et inverse développé indépendamment par notre société pour réaliser le contrôle de mouvement du six degrés plate-forme de mouvement en toute liberté.
Le logiciel de contrôle comprend, mais sans s'y limiter, les modules fonctionnels suivants : module de fonction d'auto-inspection du système, module de fonction de connexion réseau, module de fonction de configuration des paramètres, module de fonction de machine d'état, module de fonction de prétraitement des données, module de fonction de planification de trajectoire, module de fonction de calcul de la cinématique , module de fonction de communication de bus, module de fonction d'E/S numériques, module de fonction de retour d'état, module de fonction d'alarme de défaut et module de fonction de sécurité.
Le logiciel de contrôle fournit l'interface de développement secondaire et ouvre l'interface et le protocole de communication à la partie A. La plate-forme à six degrés de liberté fonctionne de manière fluide, fluide et sans trébuchement. Les algorithmes de cinématique directe et inverse remontent en temps réel l'attitude de la plate-forme ou les données de position du vérin électrique. L'algorithme a la fonction de protection de sécurité interne pour la plate-forme, qui n'endommagera pas la plate-forme si l'utilisateur saisit les données par erreur !