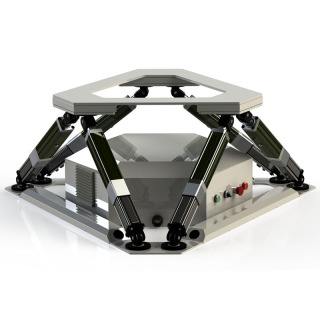
Base de mouvement du simulateur de navire
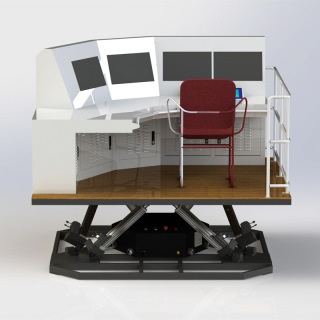
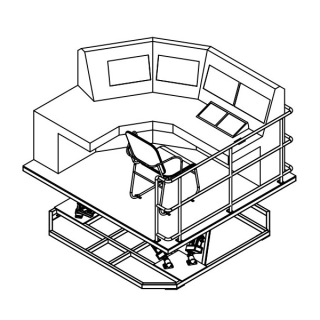
Le simulateur de navigation équipé d'une plate-forme de mouvement 6-DOF peut répondre à divers besoins de formation commerciale, tels que la formation de l'équipage, la formation des pilotes, la formation des opérateurs VTS, la formation des opérateurs radio GMDSS et d'autres formations commerciales spéciales (opération de remorqueur, opération de pêche, navigation dans la glace zone, navigation intérieure, exploitation de yachts, urgence en cas de déversement d'hydrocarbures, recherche et sauvetage), et peut également être utilisé pour la recherche scientifique telle que la démonstration d'ingénierie portuaire et de navigation, la vérification d'équipements marins intelligents, etc.
La plate-forme de mouvement à six degrés de liberté peut simuler l'attitude de mouvement du navire en cours de fonctionnement, réaliser le test de l'équipement du navire, fournir aux utilisateurs des données de test complètes sur l'état de la mer, et aider et coopérer avec les utilisateurs pour terminer le expérience de test de l'équipement du navire ; Il peut fournir des équipements de formation à la conduite en fonction des besoins des utilisateurs et des équipements virtuels pour simuler l'environnement de conduite du navire et la posture de mouvement. Nous pouvons vous fournir une personnalisation du produit, une interface d'entrée de spectre d'ondes personnalisée, répondre aux exigences de l'utilisateur pour les conditions de mer et combiner la technologie VR pour restaurer hautement la scène et l'environnement.

Spécification principale :
La performance du système
| Posture | Unité | Amplitude | Rapidité |
| Houle | millimètre | ±200 | 250 mm/s |
| Monter | millimètre | ±200 | 250 mm/s |
| Se balancer | millimètre | ±200 | 250 mm/s |
| Terrain | ° | ±25 | 25°/s |
| Rouleau | ° | ±25 | 25°/s |
| Embardée | ° | ±25 | 25°/s |
Spécification de la charge utile
| Poids du produit | 330 kilogrammes |
| Charge utile | 500 kilogrammes |
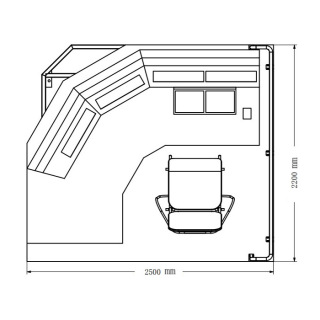
Dimensions du produit
| Longueur | 2500 millimètres |
| Largeur | 2200 millimètres |
| Hauteur min. | 820 millimètres |
Exigences d'alimentation
| Source de courant | 380V triphasé |
| Connexion | Ethernet |
Système de contrôle (armoire électrique)

Système de contrôle: le logiciel de contrôle intégré s'exécute sur le contrôleur principal, et le contrôleur de mouvement utilise le contrôleur de mouvement de bus haute performance Gugao, et utilise l'algorithme de cinématique avant et inverse développé indépendamment par notre société pour réaliser le contrôle de mouvement du six degrés plate-forme de mouvement en toute liberté.
Le logiciel de contrôle comprend, mais sans s'y limiter, les modules fonctionnels suivants : module de fonction d'auto-inspection du système, module de fonction de connexion réseau, module de fonction de configuration des paramètres, module de fonction de machine d'état, module de fonction de prétraitement des données, module de fonction de planification de trajectoire, module de fonction de calcul de la cinématique , module de fonction de communication de bus, module de fonction d'E/S numériques, module de fonction de retour d'état, module de fonction d'alarme de défaut et module de fonction de sécurité.
Le logiciel de contrôle fournit l'interface de développement secondaire et ouvre l'interface et le protocole de communication à la partie A. La plate-forme à six degrés de liberté fonctionne de manière fluide, fluide et sans trébuchement. Les algorithmes de cinématique directe et inverse remontent en temps réel l'attitude de la plate-forme ou les données de position du vérin électrique. L'algorithme a la fonction de protection de sécurité interne pour la plate-forme, qui n'endommagera pas la plate-forme si l'utilisateur saisit les données par erreur !